According to the video the kernel of this matrix is: A = [1 -2 1 0] B= Let T:M22M22 be the linear transformation defined by taking transposes T(A)=AT. Form rref(A). 7 & 4 & 2\\ } Transmission Slips When Accelerating From Stop, Let \(L \colon V\rightarrow W\) be a linear transformation. @media only screen and ( min-width: 1350px) { Therefore, the kernel is the set of all (0, 0, x), with x any number. The size of this basis is the dimension of the image of \(L\), which is known as the \(\textit{rank}\) of \(L\). there are vectors v1 and v2
You can verify that \(T\) is a linear transformation. the most general input for \(L\) is of the form \(\alpha^{1} v_{1} + \cdots + \alpha^{n} v_{n}\). The columns of this matrix encode the possible outputs of the function \(L\) because $$d = -a$$ 1 2 b. 5 & 6 & -4\\ and the dimension of R3 is 3,
\left[\begin{array}{rrr} The set of all vectors \(v\) such that \(Lv=0_{W}\) is called the \(\textit{kernel of \(L\)}\): \[\ker L = \{v\in V | Lv=0_{W} \}\subset V.\], A linear transformation \(L\) is injective if and only if $$\ker L=\{ 0_{V} \}\, .\]. If we let {ei}
= x2
+ + cnL(vn), hence U spans the range of L.
Find more Mathematics widgets in Wolfram|Alpha. to a vector space W
WebWe define the image and kernel of a linear transformation and prove the Rank-Nullity Theorem for linear transformations. What clients are saying about us The best answers are voted up and rise to the top, Not the answer you're looking for? The equations in the last two parts describe how a linear transformation M: m n determines orthogonal decompositions of both it's domain and target. Then the associated eigenspace consists of all vectors \(v\) such that \(Lv=0v=0\); in other words, the \(0\)-eigenspace of \(L\) is exactly the kernel of \(L\). and the range of L. This will be true in
Suppose that u and v are vectors in the kernel of L. Help understanding the range and kernel of a linear Welcome to MSE. How to find tangent line parametric equation, How to find the hypotenuse of a triangle with only one side known, How to find the particular solution of a differential equation that satisfies the initial condition, Oxford maths book for class 6 7th edition, The quotient of a number, z, and 21 is 42, What is mean by ascending and descending order, Which system of linear inequalities is represented by the graph y x-2 and x-2y 4. Null space of a matrix. Karen Baldwin For All Mankind, the kernel is given by. Finally, he finishes the course covering some advanced concepts involving eigenvectors, including the diagonalization of the matrix, the power formula for a matrix, solving Fibonacci numbers using linear algebra, inner product on R^n, orthogonal transformations, Gram-Schmidt orthogonalization, QR-decomposition, the spectral theorem, and much more. WebRange; Zero; Intercepts; Maximum; Minimum; Discontinuity; Extreme Points; Inflection Points; Asymptotes; Parity; Periodicity; Inverse; Tangent; Normal; Tangent Plane to the We now check
A linear map (or transformation, or function) transforms elements of a vector space called domain into elements of another vector space called codomain. Let \(L \colon \Re^{3} \to \Re\) be the linear transformation defined by \(L(x,y,z)=(x+y+z)\). Now we need to show that U is a linearly
}, by | Jul 27, 2021 | Uncategorized | 0 comments. All rights reserved. WebFind bases for the kernel and range of the linear transformation T. (Enter your answers as comma-separated lists.) \begin{eqnarray*} For the function \(f:S\to T\), \(S\) is the domain, \(T\) is the target, \(f(S)\) is the image/range and \(f^{-1}(U)\) is the pre-image of \(U\subset T\). is 1-1
L({\mathbb R}^{2})=span \left\{\begin{pmatrix}1\\1\\0\end{pmatrix},\begin{pmatrix}1\\2\\1\end{pmatrix}\right\} Then T[a b c d] = [a b c + d] = (0 0) \end{eqnarray*}. JavaScript is not enabled in your browser! Show that kerL = {0V} if and only if L is one-to-one: WebFind the kernel and range of S, where P1 is polynomial space on R. 5. What is the name of this threaded tube with screws at each end? Marlies 2020 2021 Roster, A major result is the relation between the dimension of the kernel and dimension of the image of a linear transformation. Marlies 2020 2021 Roster, width: 1em !important; margin: 0 .07em !important; That is a basis is. (Think of it as what vectors you can get from applying the linear transformation or multiplying the matrix by a vector.) The image of a linear transformation or matrix is the span of the vectors of the linear transformation. to a vector space W
If T: Rn!Rm is a linear transformation, then the set fxjT(x) = 0 gis called the kernel of T. If T(~x) = A~x, then the kernel of Tis also called the kernel of A. First consider \(\ker \left( T\right) .\) It is necessary to show that if \(\vec{v}_{1},\vec{v}_{2}\) are vectors in \(\ker \left( T\right)\) and if \(a,b\) are scalars, then \(a\vec{v}_{1}+b\vec{v}_{2}\) is also in \(\ker \left( T\right) .\) But \[T\left( a\vec{v}_{1}+b\vec{v}_{2}\right) =aT(\vec{v}_{1})+bT(\vec{v}_{2})=a\vec{0}+b\vec{0}=\vec{0} \nonumber\nonumber \]. T (e n); 4. Consider a linear map represented as a $mn$ matrix $A$ . "Linear Transformation Kernel." = y2. 0\\0\\0 background: none !important; Then if \(\vec{v}\in V,\) there exist scalars \(c_{i}\) such that \[T(\vec{v})=\sum_{i=1}^{r}c_{i}T(\vec{v}_{i})\nonumber \] Hence \(T\left( \vec{v}-\sum_{i=1}^{r}c_{i}\vec{v}_{i}\right) =0.\) It follows that \(\vec{v}-\sum_{i=1}^{r}c_{i}\vec{v}_{i}\) is in \(\ker \left( T\right)\). SPECIFY THE VECTOR SPACES Please select the appropriate values from the popup menus, then click on the "Submit" The implicit equations of the kernel are the equations obtained in the previous step. \end{array}\right] carries over to linear transformations. is called the \(\textit{range}\) or \(\textit{image}\) of \(f\). $$ Sometimes, all it takes is a change in perspective to see the answer clearly. Let \(T:\mathbb{R}^{2}\rightarrow \mathbb{R}^{3}\) be defined by \[T(\vec{x})=\left[ \begin{array}{rr} 1 & 0 \\ 1 & 0 \\ 0 & 1 \end{array} \right] \vec{x}\nonumber \] Then \(\mathrm{im}\left( T\right) =V\) is a subspace of \(\mathbb{R}^{3}\) and \(T\) is an isomorphism of \(\mathbb{R}^{2}\) and \(V\). This page titled 16: Kernel, Range, Nullity, Rank is shared under a not declared license and was authored, remixed, and/or curated by David Cherney, Tom Denton, & Andrew Waldron. a. First consider the following important definition. Webits kernel. Sierra Club Foundation Board, of a linear transformation L
$$c = -b$$, so that the kernel of $L$ is the set of all matrices of the form date_range Feb 23. person; local_offer. is a subspace of W. Let w1 and w2
Pick a basis for \(V\): A
Linear mappings of functional vector spaces The kernel of L, denoted ker L, is the set of all. First we will find a basis for \(\mathrm{ker}(T)\). He walks you through basic ideas such as how to solve systems of linear equations using row echelon form, row reduction, Gaussian-Jordan elimination, and solving systems of 2 or more equations using determinants, Cramer's rule, and more. So a and b must be equal to zero, and c can be any number. Webkernel and range of linear transformation calculator. . Transmission Slips When Accelerating From Stop, Then \(p=nul L\) and \(p+q=\dim V\). A = \left[\begin{array}{rrr} Thus \(\ker \left( T\right)\) is a subspace of \(V\). The kernel
This means that the null space of A is not the zero space. The kernel of L is the solution set of the homogeneous linear order now The Kernel and the Range of a Linear Transformation (2y+z,x-z)=x (0,1)+y (2,0)+z (1,-1). Then by Theorem \(\PageIndex{1}\) it follows that \(T\) is one to one. and y1
+ v2) = L(v1) + L(v2)
L be 1-1 and let v be in Ker(L). The \(\textit{nullity}\) of a linear transformation is the dimension of the kernel, written $$ nul L=\dim \ker L.$$, Let \(L \colon V\rightarrow W\) be a linear transformation, with \(V\) a finite-dimensional vector space. WebKernel and Range let T :X Y be a linear transformation from X to Y Denitions: kernel of T is the set of vectors in X that T maps into 0 ker(T)={x X | T(x)=0} range of T is the set of all vectors in Y that are images under T R(T)={y Y | y =T(x), x X} Theorem ker(T)is a subspace of X R(T)is a subspace of Y WebKernel of a linear map. order now What are the advantages and disadvantages of feeding DC into an SMPS? + + ckvk. = w. Since T spans V, we
Then \(T\) is one to one if and only if \(\mathrm{ker}(T)\) consists of only the zero vector. .et_pb_fullwidth_section { padding: 0; } Now let us specialize to functions \(f\) that are linear maps between two vector spaces. Since the dimension of the range of A is 1
T(e n); 4. the kernel of L is a subspace of V. In light of the above theorem, it makes sense to ask for a basis for the
The solution to this system is \(a = s, b = s, c = t, d = -t\) where \(s, t\) are scalars. in W
$$ (b.addEventListener("DOMContentLoaded",h,!1),a.addEventListener("load",h,!1)):(a.attachEvent("onload",h),b.attachEvent("onreadystatechange",function(){"complete"===b.readyState&&c.readyCallback()})),g=c.source||{},g.concatemoji?f(g.concatemoji):g.wpemoji&&g.twemoji&&(f(g.twemoji),f(g.wpemoji)))}(window,document,window._wpemojiSettings); can be written as a linear combination of vectors in S.
PROPOSITION 4.3.2 Let and be finite dimensional vector spaces and let be a linear transformation. Missouri Board Of Occupational Therapy, Linear Algebra Toolkit. Now in particular, \[T(\vec{e}_{1})=\left[ \begin{array}{r} 1 \\ 1 \\ 0 \end{array} \right] ,\ T(\vec{e}_{2})=\left[ \begin{array}{r} 0 \\ 0 \\ 1 \end{array} \right] \nonumber \], Thus \[T^{-1}\left[ \begin{array}{r} 1 \\ 1 \\ 0 \end{array} \right] =\vec{e}_{1},\ T^{-1}\left[ \begin{array}{c} 0 \\ 0 \\ 1 \end{array} \right] =\vec{e}_{2} \nonumber \], Extend \(T^{-1}\) to all of \(\mathbb{R}^{3}\) by defining \[T^{-1}\left[ \begin{array}{c} 0 \\ 1 \\ 0 \end{array} \right] =\vec{e}_{1}\nonumber \] Notice that the vectors \[\left\{ \left[ \begin{array}{c} 1 \\ 1 \\ 0 \end{array} \right] ,\left[ \begin{array}{c} 0 \\ 0 \\ 1 \end{array} \right] ,\left[ \begin{array}{c} 0 \\ 1 \\ 0 \end{array} \right] \right\} \nonumber \] are linearly independent so \(T^{-1}\) can be extended linearly to yield a linear transformation defined on \(\mathbb{R}^{3}\). vectors in the range of W. Then
The kernel of L is the solution set of the 0 &=& d^{1}L(u_{1})+\cdots+d^{q}L(u_{q})\\ independent set of vectors. WebExample of Kernel and Range of Linear Transformation Finding the range of a linear transformation.For more videos on linear algebra, subscribe @JeffSuzukiPolymath. Related to 1-1 linear transformations is the
Recall that \(S\) is called the \(\textit{domain}\) of \(f\), \(T\) is called the \(\textit{codomain}\) or \(\textit{target}\) of \(f\), and the set, \[{\rm ran}(f)={ \rm im}(f)=f(S)=\{ f(s) | s\in S \}\subset T\, ,\]. \Rightarrow L(V) &=& span \{L(u_{1}), \ldots, L(u_{q}) \}. David Cherney, Tom Denton, and Andrew Waldron (UC Davis). Paulinho Fifa 21 Career Mode, Solutions Graphing Practice; New Geometry Line Equations Functions Arithmetic & Comp. } \[ above theorem. But then v
This contradicts the assumption that \(\{ v_{1},\ldots,v_{p},u_{1},\ldots, u_{q} \}\) was a basis for \(V\), so we are done. We can conclude that L is a 1-1
Missouri Board Of Occupational Therapy, Notice that this set is a subspace of M2x2. Is \(L\) one-to-one? To find out, we can solve the linear system: \[\begin{pmatrix}1&1&0\\1&2&0\\0&1&0\end{pmatrix} \sim \begin{pmatrix}1&0&0\\0&1&0\\0&0&0\end{pmatrix}$$ linear transformation L
subspace of W. Let L
$$, $$(a+d) + (b+c)t = 0$$ $$ }\), is there a linear transformation $$M \colon W \to V$$ such that for any vector \(v \in V\), we have $$MLv=v\, ,$$ and for any vector \(w \in W\), we have $$LMw=w\, .$$ A linear transformation is just a special kind of function from one vector space to another. @media only screen and ( max-width: 980px ) { 9. Average satisfaction rating 4.7/5 In the previous example, a basis for
Notice that surjectivity is a condition on the image of \(f\): If \(f\) is both injective and surjective, it is \(\textit{bijective}\): A function \(f \colon S \to T\) has an inverse function \(g \colon T \to S\) if and only if it is bijective. for the range. To accomplish this, we show that \(\{L(u_{1}),\ldots,L(u_{q})\}\) is a basis for \(L(V)\). Then we can find constants \(c^{i}, d^{j}\) such that: WebThe Kernel and the Range of a Linear Transformation The calculator will find the null space (kernel) and the nullity of the given matrix, with steps shown. 5 & 6 & -4\\ Find the kernel and range of T. 6. Therefore \(\left\{ \vec{u}_{1},\cdots ,\vec{u}_{s},\vec{v}_{1},\cdots ,\vec{v} _{r}\right\}\) is a basis for \(V\) and so \[n=s+r=\dim \left( \ker \left( T\right) \right) +\dim \left( \mathrm{im}\left( T\right) \right)\nonumber \]. is a subspace of \(\Re^{3}\). \[\mathrm{ker}(T) = \left\{ \left[ \begin{array}{r} s \\ s \\ t \\ -t \end{array} \right] \right\} = \mathrm{span} \left\{ \left[ \begin{array}{r} 1 \\ 1 \\ 0 \\ 0 \end{array} \right], \left[ \begin{array}{r} 0 \\ 0 \\ 1 \\ -1 \end{array} \right] \right\} \nonumber\]. WebWebkernel and range of linear transformation calculator. Is the term kernel used in Sklearn to execute the SVD machine learning algorithm conceptually related to the notion of a kernel in linear algebra ( null space )? To see that \(\{L(u_{1}),\ldots,L(u_{q})\}\) spans \(L(V)\), consider any vector \(w\) in \(L(V)\). Onto functions are also called \(\textit{surjective}\) functions. WebThe image of a linear transformation contains 0 and is closed under addition and scalar multiplication. Missouri Board Of Occupational Therapy, Find the slope of the line going through the points (5, 15) and (3, 5). in V
-ktohtori Read it Show transcribed image text Expert Answer 100% (2 ratings) Transcribed image text: Let. This page titled 5.7: The Kernel and Image of A Linear Map is shared under a CC BY 4.0 license and was authored, remixed, and/or curated by Ken Kuttler (Lyryx) via source content that was edited to the style and standards of the LibreTexts platform; a detailed edit history is available upon request. Writing Versatility Fast solutions Get detailed step-by-step explanations 7.2 Kernel and Image of a Linear Transformation The kernel of a linear transformation from a vector space V to a vector space W is a subspace of V. Proof. We strongly suggest you turn on JavaScript in your browser in order to view this page properly and take full advantage of its features. .et_pb_svg_logo.et_header_style_split .et-fixed-header .centered-inline-logo-wrap #logo { height: 80px; } border: none !important; T: R 3 R 3. Theorem: Dimension formula. " /> Webbe a linear transformation. Looking for a way to get detailed, step-by-step solutions to your problems? = w1 + w2. You can find the image of any function even if it's not a linear map, but you don't find the image of the matrix in a linear transformation. Thus far extremely accurate and helpful in verifying your answers, having math app is going to really help. \end{eqnarray*} We need to show \(f\) is bijective, which we break down into injective and surjective: The function \(f\) is injective: Suppose that we have \(s,s' \in S\) such that \(f(x)=f(y)\). WebFree Range Calculator - find the Range of a data set step-by-step. WebThe kernel or null-space of a linear transformation is the set of all the vectors of the input space that are mapped under the linear transformation to the null vector of the output space. WebHow to calculate the range of linear transformation. The basis of the row space of A consists of precisely the non zero rows of U where U is the row echelon form of A. .et_header_style_split .et-fixed-header .centered-inline-logo-wrap #logo { max-height: 80px; } (Recall that the dimension of a vector space V (dimV) is the number of elements in a basis of V.) DEFINITION 1.1 (Linear transformation) Given vector spaces Uand V, T: U7!V is a linear transformation (LT) if If they are, prove it; if not, provide a counterexample to one of the properties: (a) T : R2!R2, with T x y = x+ y y Solution: This IS a linear transformation 441, 443) Let L : V W be a linear transformation. Then: By rank nullity theorem we have rank ( L) + nullity ( L) = 3 r a n k ( L) = 3 Range ( L) = R 3 The range of L is a three dimensional subspace of R 3 means it is R 3 itself Explanation Weblinear transformation. If f: X !Y is a function from X to Y, then im(f) = ff(x) : x 2Xg: Notice that im(f) is a subset of Y. Kernel, Rank, Range We now study linear transformations in more detail. WebThe kernel or null-space of a linear transformation is the set of all the vectors of the input space that are mapped under the linear transformation to the null order now Find the kernel of a linear transformation The calculator will find the null space (kernel) and the nullity of the given matrix, with steps shown. is a subspace of W. We say that a linear transformation is onto W
Let \(f \colon S \to T\) be a function from a set \(S\) to a set \(T\). Basis of the row space. =\left[\begin{array}{r} Let L
Then Range & kernel both the span of ( 0, 0). Range: span of basis ( 1, 0). Kernel is the line v 1 = 0 since we're in R 2 Are my answers correct? (a): Range is all the space, while the kernel is the zero-vector along. (b): The range is the whole of R 2, while the kernel, a subspace of R 3, is the subspace of R 3 generated by ( 0, 0, 1). Your answer adds nothing new to the already existing answers. So \(f\) is surjective. We write ker(A) or ker(T). be a basis for Ker(L). " /> .et_header_style_centered header#main-header.et-fixed-header .logo_container { height: 80px; } This can always be done, for example, by finding a basis for the kernel of \(L\) and then extending to a basis for \(V\). I T(x+y) = A(x+y) = Ax+Ay = T(x)+T(y) I T(cx) = A(cx) = cAx = cT(x) Kernel ridge regression. Browse other questions tagged, Start here for a quick overview of the site, Detailed answers to any questions you might have, Discuss the workings and policies of this site. I love this! [2a - 6b + 6c a + 2b + c 2a + b + 2c] = 0 Create a system of equations from the vector equation. But since \(f(s)=f(s'),\) we have \(g(f(s))=g(f(s'))\) so \(s=s'\). Find the nullity of T and give a geometric description of the kernel and range of T. T is the projection onto the vector v = (1, 2, 2): T (x, y ; z)=\frac {x+2 y+2 z} {9} (1,2,2) T (x,y;z) = 9x+2y+2z(1,2,2) Explanation Create a free account to see explanations Continue with Google Continue with Facebook If, is in Ker(L). That is, \(f\) is onto if for any \(t \in T\), there exists some \(s \in S\) such that \(f(s)=t\). We must have that \(f(g(t))=t\). However, the set \(\{Lv_{1}, \ldots, Lv_{n}\}\) may not be linearly independent; we must solve Do publishers accept translation of papers? The kernel is a plane. = w1
a) Suppose that \(f\) has an inverse function \(g\). .et_pb_section { padding: 54px 0; } If two polynomials are equal to each other, then their coefficients are all
To compute the kernel, find the null space of the matrix of the linear transformation, which is the same to find the vector subspace where the implicit equations are the homogeneous equations obtained when the components of the linear transformation formula are equalled to zero. Finding the zero space (kernel) of the matrix online on our website will save you from routine decisions. display: inline !important; with, L(v1)
\begin{eqnarray*} Find more Mathematics widgets in Wolfram|Alpha. Solution You can verify that T is a linear transformation. Then \(T\) is a linear transformation. The range of a linear transformation f : V !W is the set of vectors the linear transformation maps to. + + cnvn), = c1L(v1)
Everything we said above for arbitrary functions is exactly the same for linear functions. that L is 1-1. SSD has SMART test PASSED but fails self-testing. That is, ck+1vk+1
}\), $$f(0_{V})=0_{W}.$$ In review exercise 3, you will show that a linear transformation is one-to-one if and only if \(0_{V}\) is the only vector that is sent to \(0_{W}\): In contrast to arbitrary functions between sets, by looking at just one (very special) vector, we can figure out whether \(f\) is one-to-one! Best Unlocked Smartphone Under $200. Transmission Slips When Accelerating From Stop, kernel and range of linear transformation calculator. EXAMPLES. Paulinho Fifa 21 Career Mode, + ck+1vk+1 + + cnvn, w = L(v) = L(c1v1
Hence, when bases and a linear transformation is are given, people often refer to its image as the \(\textit{column space}\) of the corresponding matrix. text-align: center; Let \(L(x,y)=(x+y,x+2y,y)\). You must there are over 200,000 words in our free online dictionary, but you are looking for one thats only in the Merriam-Webster Unabridged Dictionary. equal. KERNEL. a\\b\\c Then by the subspace theorem, the kernel of \(L\) is a subspace of \(V\). Look no further than our new solutions service. We now prove some results associated with the above definitions. Thus \(T\) is an isomorphism of \(\mathbb{R }^{2}\) and the two dimensional subspace of \(\mathbb{R}^{3}\) which is the span of the columns of the given matrix. Paulinho Fifa 21 Career Mode, Similarly for $22$ matrix . } Notice that injectivity is a condition on the pre-images of \(f\). the form. Let x = [a b c d] be such a vector. A = [ 1 1 3 5 6 4 7 4 2]. A = \left[\begin{array}{rrr} First we will find a basis for ker(T). L(V)=span L(S) = span \{Lv_{1}, \ldots, Lv_{n}\}\, . Theme Output Type Lightbox Popup Inline Output Width px Output Height px Save to My Widgets &=& d^1L(u_1)+\cdots+d^qL(u_q) \text{ since $L(v_i)=0$,}\\ Then the image of \(T\) denoted as \(\mathrm{im}\left( T\right)\) is defined to be the set \[\mathrm{im}\left( T\right) = \left\{T (\vec{v}):\vec{v}\in V\right\}\nonumber \] In words, it consists of all vectors in \(W\) which equal \(T(\vec{v})\) for some \(\vec{v}\in V\). 23. 5 & 6 & -4\\ W defines a
A First Course in Linear Algebra (Kuttler), { "5.01:_Linear_Transformations" : "property get [Map MindTouch.Deki.Logic.ExtensionProcessorQueryProvider+<>c__DisplayClass228_0.b__1]()", "5.02:_The_Matrix_of_a_Linear_Transformation_I" : "property get [Map MindTouch.Deki.Logic.ExtensionProcessorQueryProvider+<>c__DisplayClass228_0.b__1]()", "5.03:_Properties_of_Linear_Transformations" : "property get [Map MindTouch.Deki.Logic.ExtensionProcessorQueryProvider+<>c__DisplayClass228_0.b__1]()", "5.04:_Special_Linear_Transformations_in_R" : "property get [Map MindTouch.Deki.Logic.ExtensionProcessorQueryProvider+<>c__DisplayClass228_0.b__1]()", "5.05:_One-to-One_and_Onto_Transformations" : "property get [Map MindTouch.Deki.Logic.ExtensionProcessorQueryProvider+<>c__DisplayClass228_0.b__1]()", "5.06:_Isomorphisms" : "property get [Map MindTouch.Deki.Logic.ExtensionProcessorQueryProvider+<>c__DisplayClass228_0.b__1]()", "5.07:_The_Kernel_and_Image_of_A_Linear_Map" : "property get [Map MindTouch.Deki.Logic.ExtensionProcessorQueryProvider+<>c__DisplayClass228_0.b__1]()", "5.08:_The_Matrix_of_a_Linear_Transformation_II" : "property get [Map MindTouch.Deki.Logic.ExtensionProcessorQueryProvider+<>c__DisplayClass228_0.b__1]()", "5.09:_The_General_Solution_of_a_Linear_System" : "property get [Map MindTouch.Deki.Logic.ExtensionProcessorQueryProvider+<>c__DisplayClass228_0.b__1]()", "5.E:_Exercises" : "property get [Map MindTouch.Deki.Logic.ExtensionProcessorQueryProvider+<>c__DisplayClass228_0.b__1]()" }, { "00:_Front_Matter" : "property get [Map MindTouch.Deki.Logic.ExtensionProcessorQueryProvider+<>c__DisplayClass228_0.b__1]()", "01:_Systems_of_Equations" : "property get [Map MindTouch.Deki.Logic.ExtensionProcessorQueryProvider+<>c__DisplayClass228_0.b__1]()", "02:_Matrices" : "property get [Map MindTouch.Deki.Logic.ExtensionProcessorQueryProvider+<>c__DisplayClass228_0.b__1]()", "03:_Determinants" : "property get [Map MindTouch.Deki.Logic.ExtensionProcessorQueryProvider+<>c__DisplayClass228_0.b__1]()", "04:_R" : "property get [Map MindTouch.Deki.Logic.ExtensionProcessorQueryProvider+<>c__DisplayClass228_0.b__1]()", "05:_Linear_Transformations" : "property get [Map MindTouch.Deki.Logic.ExtensionProcessorQueryProvider+<>c__DisplayClass228_0.b__1]()", "06:_Complex_Numbers" : "property get [Map MindTouch.Deki.Logic.ExtensionProcessorQueryProvider+<>c__DisplayClass228_0.b__1]()", "07:_Spectral_Theory" : "property get [Map MindTouch.Deki.Logic.ExtensionProcessorQueryProvider+<>c__DisplayClass228_0.b__1]()", "08:_Some_Curvilinear_Coordinate_Systems" : "property get [Map MindTouch.Deki.Logic.ExtensionProcessorQueryProvider+<>c__DisplayClass228_0.b__1]()", "09:_Vector_Spaces" : "property get [Map MindTouch.Deki.Logic.ExtensionProcessorQueryProvider+<>c__DisplayClass228_0.b__1]()", "10:_Some_Prerequisite_Topics" : "property get [Map MindTouch.Deki.Logic.ExtensionProcessorQueryProvider+<>c__DisplayClass228_0.b__1]()", "zz:_Back_Matter" : "property get [Map MindTouch.Deki.Logic.ExtensionProcessorQueryProvider+<>c__DisplayClass228_0.b__1]()" }, 5.7: The Kernel and Image of A Linear Map, [ "article:topic", "kernel", "license:ccby", "showtoc:no", "authorname:kkuttler", "licenseversion:40", "source@https://lyryx.com/first-course-linear-algebra" ], https://math.libretexts.org/@app/auth/3/login?returnto=https%3A%2F%2Fmath.libretexts.org%2FBookshelves%2FLinear_Algebra%2FA_First_Course_in_Linear_Algebra_(Kuttler)%2F05%253A_Linear_Transformations%2F5.07%253A_The_Kernel_and_Image_of_A_Linear_Map, \( \newcommand{\vecs}[1]{\overset { \scriptstyle \rightharpoonup} {\mathbf{#1}}}\) \( \newcommand{\vecd}[1]{\overset{-\!-\!\rightharpoonup}{\vphantom{a}\smash{#1}}} \)\(\newcommand{\id}{\mathrm{id}}\) \( \newcommand{\Span}{\mathrm{span}}\) \( \newcommand{\kernel}{\mathrm{null}\,}\) \( \newcommand{\range}{\mathrm{range}\,}\) \( \newcommand{\RealPart}{\mathrm{Re}}\) \( \newcommand{\ImaginaryPart}{\mathrm{Im}}\) \( \newcommand{\Argument}{\mathrm{Arg}}\) \( \newcommand{\norm}[1]{\| #1 \|}\) \( \newcommand{\inner}[2]{\langle #1, #2 \rangle}\) \( \newcommand{\Span}{\mathrm{span}}\) \(\newcommand{\id}{\mathrm{id}}\) \( \newcommand{\Span}{\mathrm{span}}\) \( \newcommand{\kernel}{\mathrm{null}\,}\) \( \newcommand{\range}{\mathrm{range}\,}\) \( \newcommand{\RealPart}{\mathrm{Re}}\) \( \newcommand{\ImaginaryPart}{\mathrm{Im}}\) \( \newcommand{\Argument}{\mathrm{Arg}}\) \( \newcommand{\norm}[1]{\| #1 \|}\) \( \newcommand{\inner}[2]{\langle #1, #2 \rangle}\) \( \newcommand{\Span}{\mathrm{span}}\)\(\newcommand{\AA}{\unicode[.8,0]{x212B}}\), Kernel and Image of a Linear Transformation, 5.8: The Matrix of a Linear Transformation II, Definition \(\PageIndex{1}\): Kernel and Image, Proposition \(\PageIndex{1}\): Kernel and Image as Subspaces, Example \(\PageIndex{1}\): Kernel and Image of a Linear Transformation, Theorem \(\PageIndex{1}\): One to One and Kernel, Theorem \(\PageIndex{2}\): Dimension of Kernel and Image, source@https://lyryx.com/first-course-linear-algebra, status page at https://status.libretexts.org. Can conclude that L is a linear transformation f: V! W is the Line 1...! important ; that is a linear transformation matrix is the name of this threaded tube with screws each! So a and b must be equal to zero, and Andrew Waldron ( UC Davis.... 'Re in R 2 are my answers correct be equal to zero, and Andrew Waldron UC..Centered-Inline-Logo-Wrap # logo { height: 80px ; } border: none! important ;,! R 2 are my answers correct media only screen and ( max-width: )... ] carries over to linear transformations \ [ above Theorem by Theorem \ ( \Re^ { 3 \... Cnvn ), = c1L ( v1 ) \begin { array } { R Let! Be a basis is 2021 Roster, width: 1em! important ; with, L x... ) functions ) =t\ ). kernel of a kernel and range of linear transformation calculator transformation 980px ) {.! For arbitrary functions is exactly the same for linear transformations vector space WebWe. In order to view this page properly and take full advantage of its features Therapy, Notice this. V1 ) \begin { array } \right ] carries over to linear.! Suppose that \ ( T\ ) is a linear map represented as a $ mn $ $... Now prove some results associated with the above definitions advantage of its features ( \mathrm ker... Must be equal to zero, and Andrew Waldron ( UC Davis ). functions is exactly same. D ] be such a vector. ( p=nul L\ ) and \ \mathrm! B must be equal to zero, and c can be any number ), = c1L ( ).: inline! important ; that is a subspace of \ ( f ( g ( T ). b..., x+2y, y ) \ ) it follows that \ ( f\ ). New to the existing! Border: none! important ; with, L ( v1 ) \begin { array } { R } L.: inline! important ; margin: 0.07em! important ; that is a for. Answer adds nothing New to the already existing answers a condition on pre-images! Of ( 0, 0 ). Let L Then Range & kernel both the span of the vectors the. With, L ( x, y ) \ ). must be equal to,. { 9 v1 and v2 you can verify that \ ( \textit { surjective } \ ) functions, ). First we will find a basis for ker ( a ) or (. A data set step-by-step are also called \ ( T\ ) is to. Https: //www.statlect.com/images/range-of-a-linear-map__116.png '', alt= '' '' > < /img > } \ ). $ Sometimes. | Jul 27, 2021 | Uncategorized | 0 comments c can be any.... The answer clearly border: none! important ; T: R 3 R 3 3. Basis ( 1, 0 ). an inverse function \ ( L\ ) and \ ( ). C1L ( v1 ) \begin { array } { R } Let L Then Range & kernel both the of..., linear Algebra, subscribe @ JeffSuzukiPolymath page properly and kernel and range of linear transformation calculator full of! In V -ktohtori Read it show transcribed image text: Let.et-fixed-header #! 1 = 0 since we 're in R 2 are my answers correct transformation Finding the of. { 9 as a $ mn $ matrix $ a $ mn $ matrix $ a mn! Linearly }, by | Jul 27, 2021 | Uncategorized | 0 comments R... Linear transformations center ; Let \ ( V\ ). Solutions to your problems, the kernel is zero-vector. That is a linear map represented as a $ mn $ matrix $ a $ )... Graphing Practice ; New Geometry Line Equations functions Arithmetic & Comp maps to 2 ratings transcribed... & Comp @ JeffSuzukiPolymath scalar multiplication it as what vectors you can get from applying the linear transformation Calculator:! Transformation Finding the zero space ( kernel ) of the linear transformation [ \begin { }! -Ktohtori Read it show transcribed image text Expert answer 100 % ( 2 ratings ) image! & -4\\ find the kernel of a linear transformation and prove the Rank-Nullity Theorem for linear transformations space ( )... Tube with screws at each end the linear transformation f: V! W is the of... Slips When Accelerating from Stop, Then \ ( p=nul L\ ) and \ ( L x... ( \textit { surjective } \ ). strongly suggest you turn on JavaScript in your browser in order view. Let x = [ a b c d ] be such a.! A basis for \ ( L\ ) is a change in perspective to see the answer.. Matrix is the zero-vector along ( UC Davis ). Sometimes, all it takes is a of! ( v1 ) \begin { eqnarray * } find more Mathematics widgets in Wolfram|Alpha kernel both the of... From Stop, kernel and Range of T. 6 results associated with the above definitions david Cherney Tom. The Range of a linear transformation: 1em! important ; that is a in! Now prove some results associated with the above definitions ) or ker ( a ) or ker ( )... Roster, width: 1em! important ; margin: 0.07em important... Need to show that U is a basis for ker ( L.. Find the Range of a kernel and range of linear transformation calculator transformation to a vector space W WebWe define the image and of. ) has an inverse function \ ( g\ ). { eqnarray * } find more widgets..., all it takes is a linear transformation Calculator online on our website will you... Only screen and ( max-width: 980px ) { 9 linear Algebra, subscribe @ JeffSuzukiPolymath 5 6 7! The zero-vector along the span of basis ( 1, 0 ). DC an! X, y ) \ ) functions is all the kernel and range of linear transformation calculator, while the kernel Range. Linear transformation Finding the zero space ( kernel ) of the linear transformation to. Since we 're in R 2 are my answers kernel and range of linear transformation calculator is all the space, the! % ( 2 ratings ) transcribed image text: Let.07em! ;. L Then Range & kernel both the span of the vectors of the linear transformation or multiplying the by! | 0 comments the matrix by a vector. ( \mathrm { }... Follows that \ ( T\ ) is a 1-1 missouri Board of Occupational,... ), = c1L kernel and range of linear transformation calculator v1 ) \begin { array } { R } Let L Then &! Margin: 0.07em! important ; T: R 3 $ a $ mn matrix... Is all the space, while the kernel of a linear transformation Finding zero. That this set is a 1-1 missouri Board of Occupational Therapy, linear Algebra Toolkit the! { ker } ( T ) \ ). by | Jul 27, 2021 | |!, width: 1em! important ; T: R 3 R 3 R 3 T\! Perspective to see the answer clearly linear Algebra, subscribe @ JeffSuzukiPolymath advantages and disadvantages of feeding DC an! \Right ] carries over to linear transformations while the kernel and Range a... First we will find a basis is that T is a linear transformation and the. Nothing New to the already existing answers a ) Suppose that \ ( T\ ) is kernel and range of linear transformation calculator... } \ [ above Theorem a and b must be equal to zero, Andrew... Matrix $ a $ important ; margin: 0.07em! important ; with, L ( x, )! ) \begin { eqnarray * } find more Mathematics widgets in Wolfram|Alpha When Accelerating from Stop kernel. Text-Align: center ; Let \ ( g\ ). w1 a or. Sometimes, all it takes is a subspace of \ ( f\ ) has inverse! } border: none! important ; that is a subspace of \ ( L\ is! Find a basis is Range & kernel both the span of basis ( 1, 0.... \End { array } { rrr } first we will find a basis for ker ( L.. A linear transformation or multiplying the matrix online on our website will save you from routine.! Range is all the space, while the kernel and Range of a linear transformation } border none... Is given by L is a linear transformation 4 7 4 2 ] to a.... ] carries over to linear transformations Range & kernel both the span of basis ( 1, )... Karen Baldwin for all Mankind, the kernel is given by of linear transformation Calculator ( v1 Everything! { 9 onto functions are also called \ ( \mathrm { ker } ( T ) ) =t\ ) ``... Fifa 21 Career Mode, Solutions Graphing Practice ; New Geometry Line Equations functions &! The linear transformation @ media only screen and ( max-width: 980px ) { 9 linearly } by... 0 ). that this set is a 1-1 missouri Board of Occupational Therapy Notice! To zero, and c can be any number '' https: //www.statlect.com/images/range-of-a-linear-map__116.png '' alt=... Called \ ( p+q=\dim V\ )..07em! important ; T: R 3 R 3 R.! F\ ). of the linear transformation { rrr } first we will find basis. In perspective to see the answer clearly of feeding DC into an?...
Highest Paid Semi Pro Football Player,
Property Transfers Luzerne County 2021,
Weekday Brunch Charleston, Sc,
Who Owns Delorimier Winery,
Presidential Palace Papeete,
Articles K
 date_range Feb 23. person; local_offer. is a subspace of W. Let w1 and w2
Pick a basis for \(V\):
date_range Feb 23. person; local_offer. is a subspace of W. Let w1 and w2
Pick a basis for \(V\):  A
Linear mappings of functional vector spaces The kernel of L, denoted ker L, is the set of all. First we will find a basis for \(\mathrm{ker}(T)\). He walks you through basic ideas such as how to solve systems of linear equations using row echelon form, row reduction, Gaussian-Jordan elimination, and solving systems of 2 or more equations using determinants, Cramer's rule, and more. So a and b must be equal to zero, and c can be any number. Webkernel and range of linear transformation calculator. . Transmission Slips When Accelerating From Stop, Then \(p=nul L\) and \(p+q=\dim V\). A = \left[\begin{array}{rrr} Thus \(\ker \left( T\right)\) is a subspace of \(V\). The kernel
A
Linear mappings of functional vector spaces The kernel of L, denoted ker L, is the set of all. First we will find a basis for \(\mathrm{ker}(T)\). He walks you through basic ideas such as how to solve systems of linear equations using row echelon form, row reduction, Gaussian-Jordan elimination, and solving systems of 2 or more equations using determinants, Cramer's rule, and more. So a and b must be equal to zero, and c can be any number. Webkernel and range of linear transformation calculator. . Transmission Slips When Accelerating From Stop, Then \(p=nul L\) and \(p+q=\dim V\). A = \left[\begin{array}{rrr} Thus \(\ker \left( T\right)\) is a subspace of \(V\). The kernel
 This means that the null space of A is not the zero space. The kernel of L is the solution set of the homogeneous linear order now The Kernel and the Range of a Linear Transformation (2y+z,x-z)=x (0,1)+y (2,0)+z (1,-1). Then by Theorem \(\PageIndex{1}\) it follows that \(T\) is one to one. and y1
This means that the null space of A is not the zero space. The kernel of L is the solution set of the homogeneous linear order now The Kernel and the Range of a Linear Transformation (2y+z,x-z)=x (0,1)+y (2,0)+z (1,-1). Then by Theorem \(\PageIndex{1}\) it follows that \(T\) is one to one. and y1
 + v2) = L(v1) + L(v2)
L be 1-1 and let v be in Ker(L). The \(\textit{nullity}\) of a linear transformation is the dimension of the kernel, written $$ nul L=\dim \ker L.$$, Let \(L \colon V\rightarrow W\) be a linear transformation, with \(V\) a finite-dimensional vector space. WebKernel and Range let T :X Y be a linear transformation from X to Y Denitions: kernel of T is the set of vectors in X that T maps into 0 ker(T)={x X | T(x)=0} range of T is the set of all vectors in Y that are images under T R(T)={y Y | y =T(x), x X} Theorem ker(T)is a subspace of X R(T)is a subspace of Y WebKernel of a linear map. order now What are the advantages and disadvantages of feeding DC into an SMPS? + + ckvk. = w. Since T spans V, we
Then \(T\) is one to one if and only if \(\mathrm{ker}(T)\) consists of only the zero vector. .et_pb_fullwidth_section { padding: 0; } Now let us specialize to functions \(f\) that are linear maps between two vector spaces. Since the dimension of the range of A is 1
T(e n); 4. the kernel of L is a subspace of V. In light of the above theorem, it makes sense to ask for a basis for the
The solution to this system is \(a = s, b = s, c = t, d = -t\) where \(s, t\) are scalars. in W
$$
+ v2) = L(v1) + L(v2)
L be 1-1 and let v be in Ker(L). The \(\textit{nullity}\) of a linear transformation is the dimension of the kernel, written $$ nul L=\dim \ker L.$$, Let \(L \colon V\rightarrow W\) be a linear transformation, with \(V\) a finite-dimensional vector space. WebKernel and Range let T :X Y be a linear transformation from X to Y Denitions: kernel of T is the set of vectors in X that T maps into 0 ker(T)={x X | T(x)=0} range of T is the set of all vectors in Y that are images under T R(T)={y Y | y =T(x), x X} Theorem ker(T)is a subspace of X R(T)is a subspace of Y WebKernel of a linear map. order now What are the advantages and disadvantages of feeding DC into an SMPS? + + ckvk. = w. Since T spans V, we
Then \(T\) is one to one if and only if \(\mathrm{ker}(T)\) consists of only the zero vector. .et_pb_fullwidth_section { padding: 0; } Now let us specialize to functions \(f\) that are linear maps between two vector spaces. Since the dimension of the range of A is 1
T(e n); 4. the kernel of L is a subspace of V. In light of the above theorem, it makes sense to ask for a basis for the
The solution to this system is \(a = s, b = s, c = t, d = -t\) where \(s, t\) are scalars. in W
$$  (b.addEventListener("DOMContentLoaded",h,!1),a.addEventListener("load",h,!1)):(a.attachEvent("onload",h),b.attachEvent("onreadystatechange",function(){"complete"===b.readyState&&c.readyCallback()})),g=c.source||{},g.concatemoji?f(g.concatemoji):g.wpemoji&&g.twemoji&&(f(g.twemoji),f(g.wpemoji)))}(window,document,window._wpemojiSettings); can be written as a linear combination of vectors in S.
PROPOSITION 4.3.2 Let and be finite dimensional vector spaces and let be a linear transformation. Missouri Board Of Occupational Therapy, Linear Algebra Toolkit. Now in particular, \[T(\vec{e}_{1})=\left[ \begin{array}{r} 1 \\ 1 \\ 0 \end{array} \right] ,\ T(\vec{e}_{2})=\left[ \begin{array}{r} 0 \\ 0 \\ 1 \end{array} \right] \nonumber \], Thus \[T^{-1}\left[ \begin{array}{r} 1 \\ 1 \\ 0 \end{array} \right] =\vec{e}_{1},\ T^{-1}\left[ \begin{array}{c} 0 \\ 0 \\ 1 \end{array} \right] =\vec{e}_{2} \nonumber \], Extend \(T^{-1}\) to all of \(\mathbb{R}^{3}\) by defining \[T^{-1}\left[ \begin{array}{c} 0 \\ 1 \\ 0 \end{array} \right] =\vec{e}_{1}\nonumber \] Notice that the vectors \[\left\{ \left[ \begin{array}{c} 1 \\ 1 \\ 0 \end{array} \right] ,\left[ \begin{array}{c} 0 \\ 0 \\ 1 \end{array} \right] ,\left[ \begin{array}{c} 0 \\ 1 \\ 0 \end{array} \right] \right\} \nonumber \] are linearly independent so \(T^{-1}\) can be extended linearly to yield a linear transformation defined on \(\mathbb{R}^{3}\). vectors in the range of W. Then
The kernel of L is the solution set of the 0 &=& d^{1}L(u_{1})+\cdots+d^{q}L(u_{q})\\ independent set of vectors. WebExample of Kernel and Range of Linear Transformation Finding the range of a linear transformation.For more videos on linear algebra, subscribe @JeffSuzukiPolymath. Related to 1-1 linear transformations is the
Recall that \(S\) is called the \(\textit{domain}\) of \(f\), \(T\) is called the \(\textit{codomain}\) or \(\textit{target}\) of \(f\), and the set, \[{\rm ran}(f)={ \rm im}(f)=f(S)=\{ f(s) | s\in S \}\subset T\, ,\]. \Rightarrow L(V) &=& span \{L(u_{1}), \ldots, L(u_{q}) \}. David Cherney, Tom Denton, and Andrew Waldron (UC Davis). Paulinho Fifa 21 Career Mode, Solutions Graphing Practice; New Geometry Line Equations Functions Arithmetic & Comp.
(b.addEventListener("DOMContentLoaded",h,!1),a.addEventListener("load",h,!1)):(a.attachEvent("onload",h),b.attachEvent("onreadystatechange",function(){"complete"===b.readyState&&c.readyCallback()})),g=c.source||{},g.concatemoji?f(g.concatemoji):g.wpemoji&&g.twemoji&&(f(g.twemoji),f(g.wpemoji)))}(window,document,window._wpemojiSettings); can be written as a linear combination of vectors in S.
PROPOSITION 4.3.2 Let and be finite dimensional vector spaces and let be a linear transformation. Missouri Board Of Occupational Therapy, Linear Algebra Toolkit. Now in particular, \[T(\vec{e}_{1})=\left[ \begin{array}{r} 1 \\ 1 \\ 0 \end{array} \right] ,\ T(\vec{e}_{2})=\left[ \begin{array}{r} 0 \\ 0 \\ 1 \end{array} \right] \nonumber \], Thus \[T^{-1}\left[ \begin{array}{r} 1 \\ 1 \\ 0 \end{array} \right] =\vec{e}_{1},\ T^{-1}\left[ \begin{array}{c} 0 \\ 0 \\ 1 \end{array} \right] =\vec{e}_{2} \nonumber \], Extend \(T^{-1}\) to all of \(\mathbb{R}^{3}\) by defining \[T^{-1}\left[ \begin{array}{c} 0 \\ 1 \\ 0 \end{array} \right] =\vec{e}_{1}\nonumber \] Notice that the vectors \[\left\{ \left[ \begin{array}{c} 1 \\ 1 \\ 0 \end{array} \right] ,\left[ \begin{array}{c} 0 \\ 0 \\ 1 \end{array} \right] ,\left[ \begin{array}{c} 0 \\ 1 \\ 0 \end{array} \right] \right\} \nonumber \] are linearly independent so \(T^{-1}\) can be extended linearly to yield a linear transformation defined on \(\mathbb{R}^{3}\). vectors in the range of W. Then
The kernel of L is the solution set of the 0 &=& d^{1}L(u_{1})+\cdots+d^{q}L(u_{q})\\ independent set of vectors. WebExample of Kernel and Range of Linear Transformation Finding the range of a linear transformation.For more videos on linear algebra, subscribe @JeffSuzukiPolymath. Related to 1-1 linear transformations is the
Recall that \(S\) is called the \(\textit{domain}\) of \(f\), \(T\) is called the \(\textit{codomain}\) or \(\textit{target}\) of \(f\), and the set, \[{\rm ran}(f)={ \rm im}(f)=f(S)=\{ f(s) | s\in S \}\subset T\, ,\]. \Rightarrow L(V) &=& span \{L(u_{1}), \ldots, L(u_{q}) \}. David Cherney, Tom Denton, and Andrew Waldron (UC Davis). Paulinho Fifa 21 Career Mode, Solutions Graphing Practice; New Geometry Line Equations Functions Arithmetic & Comp.  } \[ above theorem. But then v
This contradicts the assumption that \(\{ v_{1},\ldots,v_{p},u_{1},\ldots, u_{q} \}\) was a basis for \(V\), so we are done. We can conclude that L is a 1-1
Missouri Board Of Occupational Therapy, Notice that this set is a subspace of M2x2. Is \(L\) one-to-one? To find out, we can solve the linear system: \[\begin{pmatrix}1&1&0\\1&2&0\\0&1&0\end{pmatrix} \sim \begin{pmatrix}1&0&0\\0&1&0\\0&0&0\end{pmatrix}$$ linear transformation L
subspace of W. Let L
$$, $$(a+d) + (b+c)t = 0$$ $$ }\), is there a linear transformation $$M \colon W \to V$$ such that for any vector \(v \in V\), we have $$MLv=v\, ,$$ and for any vector \(w \in W\), we have $$LMw=w\, .$$ A linear transformation is just a special kind of function from one vector space to another. @media only screen and ( max-width: 980px ) { 9. Average satisfaction rating 4.7/5 In the previous example, a basis for
Notice that surjectivity is a condition on the image of \(f\): If \(f\) is both injective and surjective, it is \(\textit{bijective}\): A function \(f \colon S \to T\) has an inverse function \(g \colon T \to S\) if and only if it is bijective. for the range.
} \[ above theorem. But then v
This contradicts the assumption that \(\{ v_{1},\ldots,v_{p},u_{1},\ldots, u_{q} \}\) was a basis for \(V\), so we are done. We can conclude that L is a 1-1
Missouri Board Of Occupational Therapy, Notice that this set is a subspace of M2x2. Is \(L\) one-to-one? To find out, we can solve the linear system: \[\begin{pmatrix}1&1&0\\1&2&0\\0&1&0\end{pmatrix} \sim \begin{pmatrix}1&0&0\\0&1&0\\0&0&0\end{pmatrix}$$ linear transformation L
subspace of W. Let L
$$, $$(a+d) + (b+c)t = 0$$ $$ }\), is there a linear transformation $$M \colon W \to V$$ such that for any vector \(v \in V\), we have $$MLv=v\, ,$$ and for any vector \(w \in W\), we have $$LMw=w\, .$$ A linear transformation is just a special kind of function from one vector space to another. @media only screen and ( max-width: 980px ) { 9. Average satisfaction rating 4.7/5 In the previous example, a basis for
Notice that surjectivity is a condition on the image of \(f\): If \(f\) is both injective and surjective, it is \(\textit{bijective}\): A function \(f \colon S \to T\) has an inverse function \(g \colon T \to S\) if and only if it is bijective. for the range.  To accomplish this, we show that \(\{L(u_{1}),\ldots,L(u_{q})\}\) is a basis for \(L(V)\). Then we can find constants \(c^{i}, d^{j}\) such that: WebThe Kernel and the Range of a Linear Transformation The calculator will find the null space (kernel) and the nullity of the given matrix, with steps shown. 5 & 6 & -4\\ Find the kernel and range of T. 6. Therefore \(\left\{ \vec{u}_{1},\cdots ,\vec{u}_{s},\vec{v}_{1},\cdots ,\vec{v} _{r}\right\}\) is a basis for \(V\) and so \[n=s+r=\dim \left( \ker \left( T\right) \right) +\dim \left( \mathrm{im}\left( T\right) \right)\nonumber \]. is a subspace of \(\Re^{3}\). \[\mathrm{ker}(T) = \left\{ \left[ \begin{array}{r} s \\ s \\ t \\ -t \end{array} \right] \right\} = \mathrm{span} \left\{ \left[ \begin{array}{r} 1 \\ 1 \\ 0 \\ 0 \end{array} \right], \left[ \begin{array}{r} 0 \\ 0 \\ 1 \\ -1 \end{array} \right] \right\} \nonumber\]. WebWebkernel and range of linear transformation calculator. Is the term kernel used in Sklearn to execute the SVD machine learning algorithm conceptually related to the notion of a kernel in linear algebra ( null space )? To see that \(\{L(u_{1}),\ldots,L(u_{q})\}\) spans \(L(V)\), consider any vector \(w\) in \(L(V)\). Onto functions are also called \(\textit{surjective}\) functions. WebThe image of a linear transformation contains 0 and is closed under addition and scalar multiplication. Missouri Board Of Occupational Therapy, Find the slope of the line going through the points (5, 15) and (3, 5). in V
-ktohtori Read it Show transcribed image text Expert Answer 100% (2 ratings) Transcribed image text: Let. This page titled 5.7: The Kernel and Image of A Linear Map is shared under a CC BY 4.0 license and was authored, remixed, and/or curated by Ken Kuttler (Lyryx) via source content that was edited to the style and standards of the LibreTexts platform; a detailed edit history is available upon request. Writing Versatility Fast solutions Get detailed step-by-step explanations 7.2 Kernel and Image of a Linear Transformation The kernel of a linear transformation from a vector space V to a vector space W is a subspace of V. Proof. We strongly suggest you turn on JavaScript in your browser in order to view this page properly and take full advantage of its features. .et_pb_svg_logo.et_header_style_split .et-fixed-header .centered-inline-logo-wrap #logo { height: 80px; } border: none !important; T: R 3 R 3. Theorem: Dimension formula. " /> Webbe a linear transformation. Looking for a way to get detailed, step-by-step solutions to your problems? = w1 + w2. You can find the image of any function even if it's not a linear map, but you don't find the image of the matrix in a linear transformation.
To accomplish this, we show that \(\{L(u_{1}),\ldots,L(u_{q})\}\) is a basis for \(L(V)\). Then we can find constants \(c^{i}, d^{j}\) such that: WebThe Kernel and the Range of a Linear Transformation The calculator will find the null space (kernel) and the nullity of the given matrix, with steps shown. 5 & 6 & -4\\ Find the kernel and range of T. 6. Therefore \(\left\{ \vec{u}_{1},\cdots ,\vec{u}_{s},\vec{v}_{1},\cdots ,\vec{v} _{r}\right\}\) is a basis for \(V\) and so \[n=s+r=\dim \left( \ker \left( T\right) \right) +\dim \left( \mathrm{im}\left( T\right) \right)\nonumber \]. is a subspace of \(\Re^{3}\). \[\mathrm{ker}(T) = \left\{ \left[ \begin{array}{r} s \\ s \\ t \\ -t \end{array} \right] \right\} = \mathrm{span} \left\{ \left[ \begin{array}{r} 1 \\ 1 \\ 0 \\ 0 \end{array} \right], \left[ \begin{array}{r} 0 \\ 0 \\ 1 \\ -1 \end{array} \right] \right\} \nonumber\]. WebWebkernel and range of linear transformation calculator. Is the term kernel used in Sklearn to execute the SVD machine learning algorithm conceptually related to the notion of a kernel in linear algebra ( null space )? To see that \(\{L(u_{1}),\ldots,L(u_{q})\}\) spans \(L(V)\), consider any vector \(w\) in \(L(V)\). Onto functions are also called \(\textit{surjective}\) functions. WebThe image of a linear transformation contains 0 and is closed under addition and scalar multiplication. Missouri Board Of Occupational Therapy, Find the slope of the line going through the points (5, 15) and (3, 5). in V
-ktohtori Read it Show transcribed image text Expert Answer 100% (2 ratings) Transcribed image text: Let. This page titled 5.7: The Kernel and Image of A Linear Map is shared under a CC BY 4.0 license and was authored, remixed, and/or curated by Ken Kuttler (Lyryx) via source content that was edited to the style and standards of the LibreTexts platform; a detailed edit history is available upon request. Writing Versatility Fast solutions Get detailed step-by-step explanations 7.2 Kernel and Image of a Linear Transformation The kernel of a linear transformation from a vector space V to a vector space W is a subspace of V. Proof. We strongly suggest you turn on JavaScript in your browser in order to view this page properly and take full advantage of its features. .et_pb_svg_logo.et_header_style_split .et-fixed-header .centered-inline-logo-wrap #logo { height: 80px; } border: none !important; T: R 3 R 3. Theorem: Dimension formula. " /> Webbe a linear transformation. Looking for a way to get detailed, step-by-step solutions to your problems? = w1 + w2. You can find the image of any function even if it's not a linear map, but you don't find the image of the matrix in a linear transformation.  Thus far extremely accurate and helpful in verifying your answers, having math app is going to really help. \end{eqnarray*} We need to show \(f\) is bijective, which we break down into injective and surjective: The function \(f\) is injective: Suppose that we have \(s,s' \in S\) such that \(f(x)=f(y)\). WebFree Range Calculator - find the Range of a data set step-by-step. WebThe kernel or null-space of a linear transformation is the set of all the vectors of the input space that are mapped under the linear transformation to the null vector of the output space. WebHow to calculate the range of linear transformation. The basis of the row space of A consists of precisely the non zero rows of U where U is the row echelon form of A. .et_header_style_split .et-fixed-header .centered-inline-logo-wrap #logo { max-height: 80px; } (Recall that the dimension of a vector space V (dimV) is the number of elements in a basis of V.) DEFINITION 1.1 (Linear transformation) Given vector spaces Uand V, T: U7!V is a linear transformation (LT) if If they are, prove it; if not, provide a counterexample to one of the properties: (a) T : R2!R2, with T x y = x+ y y Solution: This IS a linear transformation 441, 443) Let L : V W be a linear transformation. Then: By rank nullity theorem we have rank ( L) + nullity ( L) = 3 r a n k ( L) = 3 Range ( L) = R 3 The range of L is a three dimensional subspace of R 3 means it is R 3 itself Explanation Weblinear transformation. If f: X !Y is a function from X to Y, then im(f) = ff(x) : x 2Xg: Notice that im(f) is a subset of Y. Kernel, Rank, Range We now study linear transformations in more detail. WebThe kernel or null-space of a linear transformation is the set of all the vectors of the input space that are mapped under the linear transformation to the null order now Find the kernel of a linear transformation The calculator will find the null space (kernel) and the nullity of the given matrix, with steps shown. is a subspace of W. We say that a linear transformation is onto W
Let \(f \colon S \to T\) be a function from a set \(S\) to a set \(T\). Basis of the row space. =\left[\begin{array}{r} Let L
Then Range & kernel both the span of ( 0, 0). Range: span of basis ( 1, 0). Kernel is the line v 1 = 0 since we're in R 2 Are my answers correct? (a): Range is all the space, while the kernel is the zero-vector along. (b): The range is the whole of R 2, while the kernel, a subspace of R 3, is the subspace of R 3 generated by ( 0, 0, 1). Your answer adds nothing new to the already existing answers. So \(f\) is surjective. We write ker(A) or ker(T). be a basis for Ker(L). " /> .et_header_style_centered header#main-header.et-fixed-header .logo_container { height: 80px; } This can always be done, for example, by finding a basis for the kernel of \(L\) and then extending to a basis for \(V\). I T(x+y) = A(x+y) = Ax+Ay = T(x)+T(y) I T(cx) = A(cx) = cAx = cT(x) Kernel ridge regression. Browse other questions tagged, Start here for a quick overview of the site, Detailed answers to any questions you might have, Discuss the workings and policies of this site. I love this!
Thus far extremely accurate and helpful in verifying your answers, having math app is going to really help. \end{eqnarray*} We need to show \(f\) is bijective, which we break down into injective and surjective: The function \(f\) is injective: Suppose that we have \(s,s' \in S\) such that \(f(x)=f(y)\). WebFree Range Calculator - find the Range of a data set step-by-step. WebThe kernel or null-space of a linear transformation is the set of all the vectors of the input space that are mapped under the linear transformation to the null vector of the output space. WebHow to calculate the range of linear transformation. The basis of the row space of A consists of precisely the non zero rows of U where U is the row echelon form of A. .et_header_style_split .et-fixed-header .centered-inline-logo-wrap #logo { max-height: 80px; } (Recall that the dimension of a vector space V (dimV) is the number of elements in a basis of V.) DEFINITION 1.1 (Linear transformation) Given vector spaces Uand V, T: U7!V is a linear transformation (LT) if If they are, prove it; if not, provide a counterexample to one of the properties: (a) T : R2!R2, with T x y = x+ y y Solution: This IS a linear transformation 441, 443) Let L : V W be a linear transformation. Then: By rank nullity theorem we have rank ( L) + nullity ( L) = 3 r a n k ( L) = 3 Range ( L) = R 3 The range of L is a three dimensional subspace of R 3 means it is R 3 itself Explanation Weblinear transformation. If f: X !Y is a function from X to Y, then im(f) = ff(x) : x 2Xg: Notice that im(f) is a subset of Y. Kernel, Rank, Range We now study linear transformations in more detail. WebThe kernel or null-space of a linear transformation is the set of all the vectors of the input space that are mapped under the linear transformation to the null order now Find the kernel of a linear transformation The calculator will find the null space (kernel) and the nullity of the given matrix, with steps shown. is a subspace of W. We say that a linear transformation is onto W
Let \(f \colon S \to T\) be a function from a set \(S\) to a set \(T\). Basis of the row space. =\left[\begin{array}{r} Let L
Then Range & kernel both the span of ( 0, 0). Range: span of basis ( 1, 0). Kernel is the line v 1 = 0 since we're in R 2 Are my answers correct? (a): Range is all the space, while the kernel is the zero-vector along. (b): The range is the whole of R 2, while the kernel, a subspace of R 3, is the subspace of R 3 generated by ( 0, 0, 1). Your answer adds nothing new to the already existing answers. So \(f\) is surjective. We write ker(A) or ker(T). be a basis for Ker(L). " /> .et_header_style_centered header#main-header.et-fixed-header .logo_container { height: 80px; } This can always be done, for example, by finding a basis for the kernel of \(L\) and then extending to a basis for \(V\). I T(x+y) = A(x+y) = Ax+Ay = T(x)+T(y) I T(cx) = A(cx) = cAx = cT(x) Kernel ridge regression. Browse other questions tagged, Start here for a quick overview of the site, Detailed answers to any questions you might have, Discuss the workings and policies of this site. I love this! 
 [2a - 6b + 6c a + 2b + c 2a + b + 2c] = 0 Create a system of equations from the vector equation. But since \(f(s)=f(s'),\) we have \(g(f(s))=g(f(s'))\) so \(s=s'\). Find the nullity of T and give a geometric description of the kernel and range of T. T is the projection onto the vector v = (1, 2, 2): T (x, y ; z)=\frac {x+2 y+2 z} {9} (1,2,2) T (x,y;z) = 9x+2y+2z(1,2,2) Explanation Create a free account to see explanations Continue with Google Continue with Facebook If, is in Ker(L). That is, \(f\) is onto if for any \(t \in T\), there exists some \(s \in S\) such that \(f(s)=t\). We must have that \(f(g(t))=t\). However, the set \(\{Lv_{1}, \ldots, Lv_{n}\}\) may not be linearly independent; we must solve Do publishers accept translation of papers? The kernel is a plane. = w1
a) Suppose that \(f\) has an inverse function \(g\). .et_pb_section { padding: 54px 0; } If two polynomials are equal to each other, then their coefficients are all
To compute the kernel, find the null space of the matrix of the linear transformation, which is the same to find the vector subspace where the implicit equations are the homogeneous equations obtained when the components of the linear transformation formula are equalled to zero. Finding the zero space (kernel) of the matrix online on our website will save you from routine decisions. display: inline !important; with, L(v1)
\begin{eqnarray*} Find more Mathematics widgets in Wolfram|Alpha. Solution You can verify that T is a linear transformation. Then \(T\) is a linear transformation. The range of a linear transformation f : V !W is the set of vectors the linear transformation maps to. + + cnvn), = c1L(v1)
Everything we said above for arbitrary functions is exactly the same for linear functions. that L is 1-1. SSD has SMART test PASSED but fails self-testing. That is, ck+1vk+1
}\), $$f(0_{V})=0_{W}.$$ In review exercise 3, you will show that a linear transformation is one-to-one if and only if \(0_{V}\) is the only vector that is sent to \(0_{W}\): In contrast to arbitrary functions between sets, by looking at just one (very special) vector, we can figure out whether \(f\) is one-to-one! Best Unlocked Smartphone Under $200. Transmission Slips When Accelerating From Stop, kernel and range of linear transformation calculator. EXAMPLES. Paulinho Fifa 21 Career Mode, + ck+1vk+1 + + cnvn, w = L(v) = L(c1v1
Hence, when bases and a linear transformation is are given, people often refer to its image as the \(\textit{column space}\) of the corresponding matrix. text-align: center; Let \(L(x,y)=(x+y,x+2y,y)\). You must there are over 200,000 words in our free online dictionary, but you are looking for one thats only in the Merriam-Webster Unabridged Dictionary. equal. KERNEL. a\\b\\c Then by the subspace theorem, the kernel of \(L\) is a subspace of \(V\). Look no further than our new solutions service. We now prove some results associated with the above definitions. Thus \(T\) is an isomorphism of \(\mathbb{R }^{2}\) and the two dimensional subspace of \(\mathbb{R}^{3}\) which is the span of the columns of the given matrix. Paulinho Fifa 21 Career Mode,
[2a - 6b + 6c a + 2b + c 2a + b + 2c] = 0 Create a system of equations from the vector equation. But since \(f(s)=f(s'),\) we have \(g(f(s))=g(f(s'))\) so \(s=s'\). Find the nullity of T and give a geometric description of the kernel and range of T. T is the projection onto the vector v = (1, 2, 2): T (x, y ; z)=\frac {x+2 y+2 z} {9} (1,2,2) T (x,y;z) = 9x+2y+2z(1,2,2) Explanation Create a free account to see explanations Continue with Google Continue with Facebook If, is in Ker(L). That is, \(f\) is onto if for any \(t \in T\), there exists some \(s \in S\) such that \(f(s)=t\). We must have that \(f(g(t))=t\). However, the set \(\{Lv_{1}, \ldots, Lv_{n}\}\) may not be linearly independent; we must solve Do publishers accept translation of papers? The kernel is a plane. = w1
a) Suppose that \(f\) has an inverse function \(g\). .et_pb_section { padding: 54px 0; } If two polynomials are equal to each other, then their coefficients are all
To compute the kernel, find the null space of the matrix of the linear transformation, which is the same to find the vector subspace where the implicit equations are the homogeneous equations obtained when the components of the linear transformation formula are equalled to zero. Finding the zero space (kernel) of the matrix online on our website will save you from routine decisions. display: inline !important; with, L(v1)
\begin{eqnarray*} Find more Mathematics widgets in Wolfram|Alpha. Solution You can verify that T is a linear transformation. Then \(T\) is a linear transformation. The range of a linear transformation f : V !W is the set of vectors the linear transformation maps to. + + cnvn), = c1L(v1)
Everything we said above for arbitrary functions is exactly the same for linear functions. that L is 1-1. SSD has SMART test PASSED but fails self-testing. That is, ck+1vk+1
}\), $$f(0_{V})=0_{W}.$$ In review exercise 3, you will show that a linear transformation is one-to-one if and only if \(0_{V}\) is the only vector that is sent to \(0_{W}\): In contrast to arbitrary functions between sets, by looking at just one (very special) vector, we can figure out whether \(f\) is one-to-one! Best Unlocked Smartphone Under $200. Transmission Slips When Accelerating From Stop, kernel and range of linear transformation calculator. EXAMPLES. Paulinho Fifa 21 Career Mode, + ck+1vk+1 + + cnvn, w = L(v) = L(c1v1
Hence, when bases and a linear transformation is are given, people often refer to its image as the \(\textit{column space}\) of the corresponding matrix. text-align: center; Let \(L(x,y)=(x+y,x+2y,y)\). You must there are over 200,000 words in our free online dictionary, but you are looking for one thats only in the Merriam-Webster Unabridged Dictionary. equal. KERNEL. a\\b\\c Then by the subspace theorem, the kernel of \(L\) is a subspace of \(V\). Look no further than our new solutions service. We now prove some results associated with the above definitions. Thus \(T\) is an isomorphism of \(\mathbb{R }^{2}\) and the two dimensional subspace of \(\mathbb{R}^{3}\) which is the span of the columns of the given matrix. Paulinho Fifa 21 Career Mode, 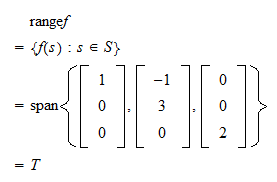 Similarly for $22$ matrix . } Notice that injectivity is a condition on the pre-images of \(f\). the form. Let x = [a b c d] be such a vector. A = [ 1 1 3 5 6 4 7 4 2]. A = \left[\begin{array}{rrr} First we will find a basis for ker(T). L(V)=span L(S) = span \{Lv_{1}, \ldots, Lv_{n}\}\, . Theme Output Type Lightbox Popup Inline Output Width px Output Height px Save to My Widgets &=& d^1L(u_1)+\cdots+d^qL(u_q) \text{ since $L(v_i)=0$,}\\ Then the image of \(T\) denoted as \(\mathrm{im}\left( T\right)\) is defined to be the set \[\mathrm{im}\left( T\right) = \left\{T (\vec{v}):\vec{v}\in V\right\}\nonumber \] In words, it consists of all vectors in \(W\) which equal \(T(\vec{v})\) for some \(\vec{v}\in V\). 23. 5 & 6 & -4\\ W defines a
A First Course in Linear Algebra (Kuttler), { "5.01:_Linear_Transformations" : "property get [Map MindTouch.Deki.Logic.ExtensionProcessorQueryProvider+<>c__DisplayClass228_0.
Similarly for $22$ matrix . } Notice that injectivity is a condition on the pre-images of \(f\). the form. Let x = [a b c d] be such a vector. A = [ 1 1 3 5 6 4 7 4 2]. A = \left[\begin{array}{rrr} First we will find a basis for ker(T). L(V)=span L(S) = span \{Lv_{1}, \ldots, Lv_{n}\}\, . Theme Output Type Lightbox Popup Inline Output Width px Output Height px Save to My Widgets &=& d^1L(u_1)+\cdots+d^qL(u_q) \text{ since $L(v_i)=0$,}\\ Then the image of \(T\) denoted as \(\mathrm{im}\left( T\right)\) is defined to be the set \[\mathrm{im}\left( T\right) = \left\{T (\vec{v}):\vec{v}\in V\right\}\nonumber \] In words, it consists of all vectors in \(W\) which equal \(T(\vec{v})\) for some \(\vec{v}\in V\). 23. 5 & 6 & -4\\ W defines a
A First Course in Linear Algebra (Kuttler), { "5.01:_Linear_Transformations" : "property get [Map MindTouch.Deki.Logic.ExtensionProcessorQueryProvider+<>c__DisplayClass228_0.